Настройками поделюсь, а правильно (или неправильно) сделать можно только с участием того, кто разрабатывает локомотив.
Добавлено спустя 6 часов 5 минут 47 секунд:
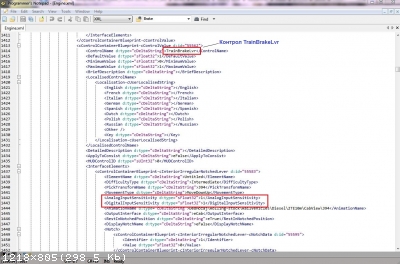
Выполняю обещание. Лучше один раз показать на скрине, чем копировать много-много кода в xml (лишние поля не скрыть для компактности):
Analog input sensitivity - скорость перемещения рукоятки при управлении мышкой (И КНОПОЧНЫМ ГЕЙМПАДОМ. Ага.)
Digital input sensitivity - скорость перемещения рукоятки при нажатии клавиши клавиатуры.
Соотношение Min/Max value контрола и этих двух параметров и отвечает за "липучесть" и точность установки рукоятки. Если Max value больше единицы, значения sensitivity тоже можно пропорционально увеличивать.
Rest in Notched Position - параметр задает поведение рукоятки при попадании на позицию. Если true, ручка будет стремиться встать в ближайшее положение между двумя соседними. Если false, рукоятка будет двигаться без фиксации, и в этом случае Notches малополезны. Однако, именно они задают логику работы системных контролов. У меня рукоятка крана считывается скриптом, поэтому все позиции безымянные.
Рассчитать положение очень просто - полный угол поворота рукоятки крана машиниста в градусах принимаем за 1.0, затем вычисляем проценты, зная углы каждой позиции. Итого:
0 - отпуск и сверхзарядка
0.32 - поездное
0.45 - перекрыша без питания
0.55 - перекрыша с питанием
0.65 - служебное торможение
1.00 - экстренное торможение и граница шкалы.
На самом деле, на каждой из позиций я смещаю "рабочую точку" скриптом. Например, экстренное торможение начинается на 0.9 хода ручки, а служебное торможение длится от 0.61 до 0.75, причем пропорционально величине изменяется темп разрядки УР. Точки заданы исключительно для фиксации ручки крана.
С данными настройками я уверенно управляю краном машиниста своего тепловоза от клавиатуры.
Информация: Уважаемые посетители! В течение нескольких месяцев на форуме существовала проблема с регистрацией новых пользователей, о которой администрации стало известно недавно. Если вы ранее пытались зарегистрироваться на форуме, но не получили на ваш e-mail письмо с ссылкой для подтверждения регистрации, просим вас зарегистрироваться повторно. Приносим извинения за доставленные неудобства. Если вы все еще испытываете проблемы с регистрацией на форуме, обратитесь за помощью на e-mail: mr.angelo@railroadsim.net
Обсуждение экзистенциальных вопросов разработки дополнений
Re: Тепловозы 2ТЭ10....
![]() Skif » 17.01.2019, 16:41
Skif » 17.01.2019, 16:41

- Skif
- Сообщения: 3750
- Зарегистрирован: 01.10.2009, 17:42
- Благодарил (а): 0 раз.
- Поблагодарили: 2 раз.
- Имя: Дмитрий
Re: Тепловозы 2ТЭ10....
![]() Света » 17.01.2019, 23:07
Света » 17.01.2019, 23:07
Осторожно поинтересуюсь - а за счет чего данная настройка работает четче, если она идентично сделана у обоих названных локомотивах?Skif писал(а):Могу поделиться настройками крана машиниста (скрипт не требуется), который работает намного четче, чем у ТЭМ2 или 2ТЭ10
P.S. к слову, эти правки сделать можно спокойно самостоятельно, так как поправить под себя конфиг ни разу не сложно и автор мода не нужен, но... смысл делать в конфиге то, что уже там сделано давным-давно? Я, как бы, деда не защищаю, но серьезно, перед тем, как говорить об уникальности настроек (которые давным-давно являются стандартными), можно было, как минимум, открыть конфиг и убедиться, что в нем все практически 1 в 1, если не считать ошибок в предлагаемом варианте

Как и в ТЭМ2. Сделанном почти 10 лет назад, до эпохи динамического освещения в симуляторе.


Забанена по собственному желанию. По важным вопросам связаться со мной можно через почту divovigna@gmail.com
-

Света - Сообщения: 1338
- Зарегистрирован: 18.06.2016, 19:38
- Благодарил (а): 983 раз.
- Поблагодарили: 1805 раз.
- Играю в: Train Simulator Classic
- Имя: Пандора
Re: Тепловозы 2ТЭ10....
![]() Света » 17.01.2019, 23:22
Света » 17.01.2019, 23:22
Izumka, в обеих локомотивах (и ТЭМ2, и ТЭ10м) изначально сделана такая настройка.
К слову, это не является настройкой, это конфигурация контрола.
Так что можно выдохнуть и спокойно жить дальше. Это не Америка ни разу.
К слову, это не является настройкой, это конфигурация контрола.
Так что можно выдохнуть и спокойно жить дальше. Это не Америка ни разу.
Забанена по собственному желанию. По важным вопросам связаться со мной можно через почту divovigna@gmail.com
-
Света - Сообщения: 1338
- Зарегистрирован: 18.06.2016, 19:38
- Благодарил (а): 983 раз.
- Поблагодарили: 1805 раз.
- Играю в: Train Simulator Classic
- Имя: Пандора
Re: Тепловозы 2ТЭ10....
![]() Izumka » 17.01.2019, 23:30
Izumka » 17.01.2019, 23:30
Благодарю за разъяснение.
А где настраиваются параметры - "Analog input sensitivity - скорость перемещения рукоятки при управлении мышкой (И КНОПОЧНЫМ ГЕЙМПАДОМ. Ага.)
Digital input sensitivity - скорость перемещения рукоятки при нажатии клавиши клавиатуры. "
А где настраиваются параметры - "Analog input sensitivity - скорость перемещения рукоятки при управлении мышкой (И КНОПОЧНЫМ ГЕЙМПАДОМ. Ага.)
Digital input sensitivity - скорость перемещения рукоятки при нажатии клавиши клавиатуры. "
- Izumka
- Сообщения: 65
- Зарегистрирован: 17.04.2017, 23:18
- Благодарил (а): 287 раз.
- Поблагодарили: 14 раз.
- Имя: Андрей
Re: Тепловозы 2ТЭ10....
![]() Света » 18.01.2019, 00:58
Света » 18.01.2019, 00:58
В интерфейсных вкладках контролов. Конкретно в ТЭ10м-2437 это контрол TrainBrakeLvr. Редактировать надо xml-файл главного конфига, я покажу на примере Engine.xml.
После редактирования xml-файл нужно сохранить и сконвертить в *.bin с помощью serz-а.

После редактирования xml-файл нужно сохранить и сконвертить в *.bin с помощью serz-а.
Забанена по собственному желанию. По важным вопросам связаться со мной можно через почту divovigna@gmail.com
-
Света - Сообщения: 1338
- Зарегистрирован: 18.06.2016, 19:38
- Благодарил (а): 983 раз.
- Поблагодарили: 1805 раз.
- Играю в: Train Simulator Classic
- Имя: Пандора
Re: Тепловозы 2ТЭ10....
![]() Skif » 18.01.2019, 15:56
Skif » 18.01.2019, 15:56
И лучше профессионально и корректно объясните людям, какую пользу они извлекут, применив вашу конфигурацию контрола.
Я уже написал и разъяснил, за что какой параметр отвечает. Почему я не привел xml, тоже пояснил выше. Больше маяться херней не намерен - если кому то нужна помощь, пишите в ЛС. В отличие от Светы, я их никогда не закрываю и отвечаю всем, по возможности - своевременно.
Без последствий для локомотива (что критично для пользователя, не знающего, что он меняет и зачем) редактировать стоит только чувствительность - Digital Input Sensitivity. Если менять значения Notch, это может потащить логику в скрипте или настройках звука. Например, щелчки фиксаторов у рукоятки крана обычно садят именно на процент перевода ручки по положениям. Ну, и ручка будет фиксироваться не по зубцам. Почему этим, тем не менее, не стоит заниматься без консультации с автором, если Света считает это нормальным, тоже уточню - чтобы не прослыть свиньей, случайно (либо намеренно) перевыложив данный тепловоз на стороннем ресурсе. Да и при редактировании "для себя" следующее авторское обновление с очень высокой долей вероятности затрёт ваши изменения.
Также, чтобы закрыть раз и навсегда вопрос с углами положений крана машиниста усл. №394 смотрим сюда:

Полный угол хода рукоятки составляет 129 градусов. Для удобства расчетов и с учетом люфта фиксатора можно без страданий взять 130. Итого - 100% хода ручки соответствуют 130 градусам поворота.
Получаем углы позиций, считая что 1-е положение соответствует 0% хода и откладывая остальные от него:
Отпуск и зарядка: 0.0
Поездное: (40/130) = 0.3
Перекрыша без питания: 60/130 = 0.5
Перекрыша с питанием: 72/130 = 0.55
Предварительная разрядка/ЭПТ, положения VA и VЭ : 79/130 = 0.6
Служебное торможение: 90/130 = 0.69
Экстренное торможение: очевидно, что 1.0
Если кому-то хочется, можете попробовать разбить ручку "истинными" значениями. Я часть из них изменил совершенно осознанно, отлаживая работу системы с РЕАЛЬНЫМ краном машиниста, подключенным к тренажеру через магниторезистивный датчик положения (точность измерения угла - 0.5 градуса на краях диапазона и 0.12 в рабочей области шкалы), чтобы получить четкие срабатывания в тех же положениях ручки, что и у реального крана "под воздухом". Если и имеются расхождения, они незначительны и определенно не стоят того, чтобы раздувать из них срач. Учитывая, что даже русскоязычный пользователь, не имея желания изучить работу тормозных приборов на катаемом локомотиве, зачастую тормозами пользуется неправильно, я бы задумался об автоматизации процесса хотя бы по схеме Trainz-а с управлением тормозами тремя кнопками.
- Skif
- Сообщения: 3750
- Зарегистрирован: 01.10.2009, 17:42
- Благодарил (а): 0 раз.
- Поблагодарили: 2 раз.
- Имя: Дмитрий
Re: Тепловозы 2ТЭ10....
![]() i2GR » 18.01.2019, 20:59
i2GR » 18.01.2019, 20:59
а в ЧС2 для нотчей контрола крана прямо значения углов и заюзаны мин = 0, макс = 129 
-

i2GR - Сообщения: 540
- Зарегистрирован: 04.09.2008, 16:59
- Благодарил (а): 260 раз.
- Поблагодарили: 303 раз.
- Блог: Просмотр блога (4)
- Имя: Игорь
Re: Тепловозы 2ТЭ10....
![]() Света » 18.01.2019, 21:08
Света » 18.01.2019, 21:08
i2GR, оно, как бы, у всех так... Ну, относительно.
Кроме Skif-а. У него сначала было так:
А потом, после пары моих невинных вопросов, вызвавших вселенский пожар, стало так:
Добавлено спустя 52 секунды:
whity777, спасибо большое!
Кроме Skif-а. У него сначала было так:
Skif писал(а):0 - отпуск и сверхзарядка
0.32 - поездное
0.45 - перекрыша без питания
0.55 - перекрыша с питанием
0.65 - служебное торможение
1.00 - экстренное торможение и граница шкалы.
А потом, после пары моих невинных вопросов, вызвавших вселенский пожар, стало так:
Skif писал(а):Отпуск и зарядка: 0.0
Поездное: (40/130) = 0.3
Перекрыша без питания: 60/130 = 0.5
Перекрыша с питанием: 72/130 = 0.55
Предварительная разрядка/ЭПТ, положения VA и VЭ : 79/130 = 0.6
Служебное торможение: 90/130 = 0.69
Экстренное торможение: очевидно, что 1.0
Добавлено спустя 52 секунды:
whity777, спасибо большое!
Забанена по собственному желанию. По важным вопросам связаться со мной можно через почту divovigna@gmail.com
-
Света - Сообщения: 1338
- Зарегистрирован: 18.06.2016, 19:38
- Благодарил (а): 983 раз.
- Поблагодарили: 1805 раз.
- Играю в: Train Simulator Classic
- Имя: Пандора
Re: Обсуждение экзистенциальных вопросов разработки дополнен
![]() BooYa » 18.01.2019, 23:38
BooYa » 18.01.2019, 23:38
Для тех кто пропустил, удалённые оскорбления скифа. Даже дед, у которого бомбило и поболее, и несколько раз
Сори что без превью, убогий ультрапик не грузит такие пропорции, а чёт файлообменника другого так и руки не дошли найти.
раз
два
Сори что без превью, убогий ультрапик не грузит такие пропорции, а чёт файлообменника другого так и руки не дошли найти.
раз

два

-

BooYa - Сообщения: 3751
- Зарегистрирован: 24.01.2010, 16:30
- Откуда: Екатеринбург
- Благодарил (а): 1560 раз.
- Поблагодарили: 2965 раз.
- Играю в: Train Simulator Classic
- Роль: Разработчик
- Имя: Андрей
Re: Обсуждение экзистенциальных вопросов разработки дополнен
![]() le Sandro » 19.01.2019, 00:53
le Sandro » 19.01.2019, 00:53
Skif, пока...
Кроме рассуждений мы в RW от тебя ничего не получили и не узнали.
Полемиков и критиков у нас и так хватает. Пиздеть, не мешки ворочать.
Кроме рассуждений мы в RW от тебя ничего не получили и не узнали.
Полемиков и критиков у нас и так хватает. Пиздеть, не мешки ворочать.

-
le Sandro - Сообщения: 2709
- Зарегистрирован: 30.03.2005, 00:14
- Откуда: Пенза
- Благодарил (а): 1614 раз.
- Поблагодарили: 1165 раз.
- Блог: Просмотр блога (2)
- Играю в: Train Simulator Classic
- Роль: Разработчик
Re: Обсуждение экзистенциальных вопросов разработки дополнен
![]() BooYa » 19.01.2019, 06:04
BooYa » 19.01.2019, 06:04
Саня, я это сюда выложил, т.к. Linx меня очень обескуражил своим заявлением. В модерке его нет, а зашёл он, скорее всего, когда я уже удалил. Так совпало, что я зашёл на форум, буквально, через несколько минут, после последнего сообщения скифа. Ессно такую похабщину я выпилил сразу. Уподобляться той дичи, которая творится в комментах ВК и на Ютабе, тут вообще не место.
Бомбления на скифа получить я не могу, потому что уже давно всё про него выяснено. Но за время своей модерки, вот такие выражения, про неестественные позы, про курево в туалете, хотя они одногодки...Обещания посыла (ни за что, по сути-то), и про копир, чтобы размножаться. Не, серьезно. Мне было пофиг на скифа много лет, я просто посмеивался над его враньём. Но если бы он также наехал на Машу, которая, в отличие от Светы, нам в РВ ничё ваще не сделала, я бы так же за неё вступился. Я бы вступился также и за остальных разработчиков, даже мужского пола. Но у нас меж собой таки попроще. Тем не менее.
Из-за того, что Света модератор, ей пришлось стерпеть вот эту херню в свой адрес, просто из-за того, что её бы обвинили в личных мотивах. Да хоспаде, меня, блин, обвинили, как минимум, 3 человека. После такого, я даже модерировать не хочу этот форум. Когда какого-то непонятного "это", еще и защищают, красные и зеленые. Фу, блять.
Бомбления на скифа получить я не могу, потому что уже давно всё про него выяснено. Но за время своей модерки, вот такие выражения, про неестественные позы, про курево в туалете, хотя они одногодки...Обещания посыла (ни за что, по сути-то), и про копир, чтобы размножаться. Не, серьезно. Мне было пофиг на скифа много лет, я просто посмеивался над его враньём. Но если бы он также наехал на Машу, которая, в отличие от Светы, нам в РВ ничё ваще не сделала, я бы так же за неё вступился. Я бы вступился также и за остальных разработчиков, даже мужского пола. Но у нас меж собой таки попроще. Тем не менее.
Из-за того, что Света модератор, ей пришлось стерпеть вот эту херню в свой адрес, просто из-за того, что её бы обвинили в личных мотивах. Да хоспаде, меня, блин, обвинили, как минимум, 3 человека. После такого, я даже модерировать не хочу этот форум. Когда какого-то непонятного "это", еще и защищают, красные и зеленые. Фу, блять.
-
BooYa - Сообщения: 3751
- Зарегистрирован: 24.01.2010, 16:30
- Откуда: Екатеринбург
- Благодарил (а): 1560 раз.
- Поблагодарили: 2965 раз.
- Играю в: Train Simulator Classic
- Роль: Разработчик
- Имя: Андрей
Re: Обсуждение экзистенциальных вопросов разработки дополнен
![]() le Sandro » 20.01.2019, 01:12
le Sandro » 20.01.2019, 01:12
Андрюх, забей. Скиф ушел на РВ2. Всё, у нас опять котоламповый форум без срачей и грызни.
-
le Sandro - Сообщения: 2709
- Зарегистрирован: 30.03.2005, 00:14
- Откуда: Пенза
- Благодарил (а): 1614 раз.
- Поблагодарили: 1165 раз.
- Блог: Просмотр блога (2)
- Играю в: Train Simulator Classic
- Роль: Разработчик
Re: Обсуждение экзистенциальных вопросов разработки дополнен
![]() i2GR » 20.01.2019, 02:15
i2GR » 20.01.2019, 02:15
Ненене, Саш! Околоновогодние эпичные срачи должны стать доброй "котоламповой" традицией в нашем скромном уютном закутке  . Всем добра!
. Всем добра! 
P.S. Игорь, кстати, на этот раз воистину ни при чем!
P.P.S. Если серьезно, то я , по жизни все пропустил, то есть узнал уже про все по факту и второй день под впечатлением, но Андрей все правильно сделал. Короче, не забыли, но оставили... и пошли дальше!
. Всем добра! P.S. Игорь, кстати, на этот раз воистину ни при чем!
P.P.S. Если серьезно, то я , по жизни все пропустил, то есть узнал уже про все по факту и второй день под впечатлением, но Андрей все правильно сделал. Короче, не забыли, но оставили... и пошли дальше!
-
i2GR - Сообщения: 540
- Зарегистрирован: 04.09.2008, 16:59
- Благодарил (а): 260 раз.
- Поблагодарили: 303 раз.
- Блог: Просмотр блога (4)
- Имя: Игорь
Re: Обсуждение экзистенциальных вопросов разработки дополнен
![]() BooYa » 20.01.2019, 02:20
BooYa » 20.01.2019, 02:20
le Sandro писал(а):Скиф ушел на РВ2. Всё, у нас опять котоламповый форум без срачей и грызни.
Да какой ему РВ2. Мы с Энималкосмиком его там быстро осадили, а модеры там не жуют сопли, его там быстро осадят, и в бан он улетит при малейшем конфликте)))))
i2GR писал(а):P.S. Игорь, кстати, на этот раз воистину ни при чем!
P.P.S. Если серьезно, то я , по жизни все пропустил, то есть узнал уже про все по факту и второй день под впечатлением, но Андрей все правильно сделал. Короче, не забыли, но оставили... и пошли дальше!
Ты просто Линкса лайкнул, а он, я считаю, в данном случае не прав. Ну нет сравнению адекватному представлению пруфов с картинками и объяснениями, и оскорблений ниже пояса, тем более женщине, ну.
-
BooYa - Сообщения: 3751
- Зарегистрирован: 24.01.2010, 16:30
- Откуда: Екатеринбург
- Благодарил (а): 1560 раз.
- Поблагодарили: 2965 раз.
- Играю в: Train Simulator Classic
- Роль: Разработчик
- Имя: Андрей
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 6
Powered by phpBB